| sault73 | Date: Tuesday, 26/Aug/2014, 4:29 PM | Message # 1 |
 Ultimo Rango
Group: Administradores
Messages: 6
Status: Offline
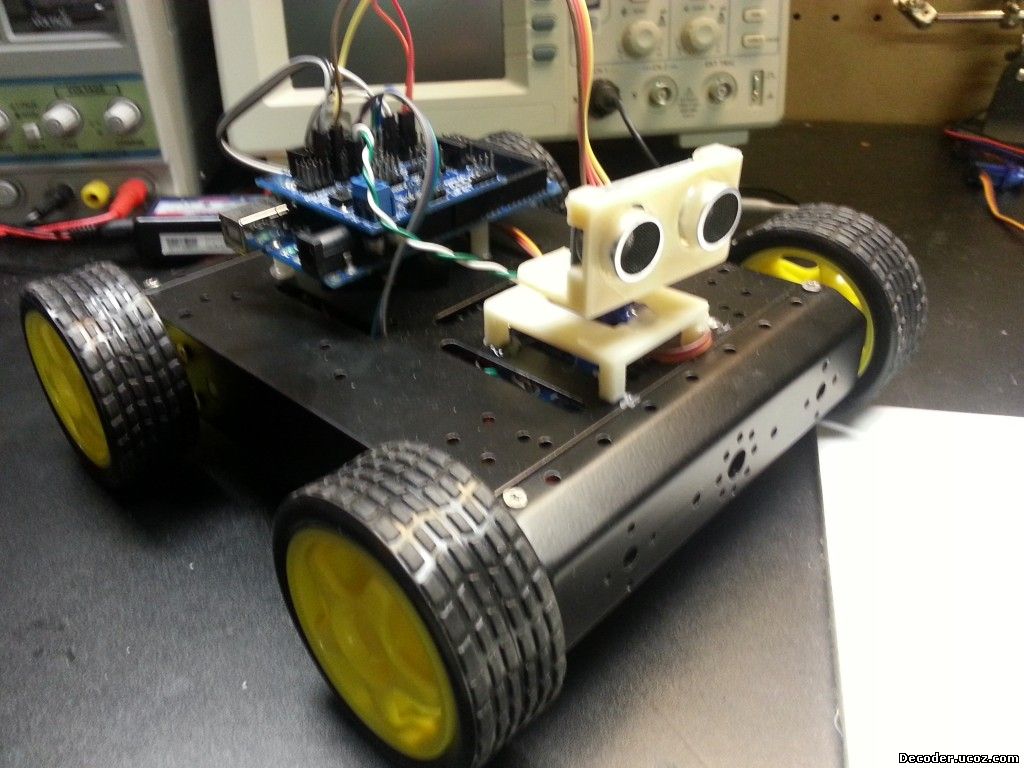
| A while back I purchased the Sainsmart 4WD Arduino robot. I had virtually zero experience building or programming an autonomous robot so I thought the project would be a great learning experience.

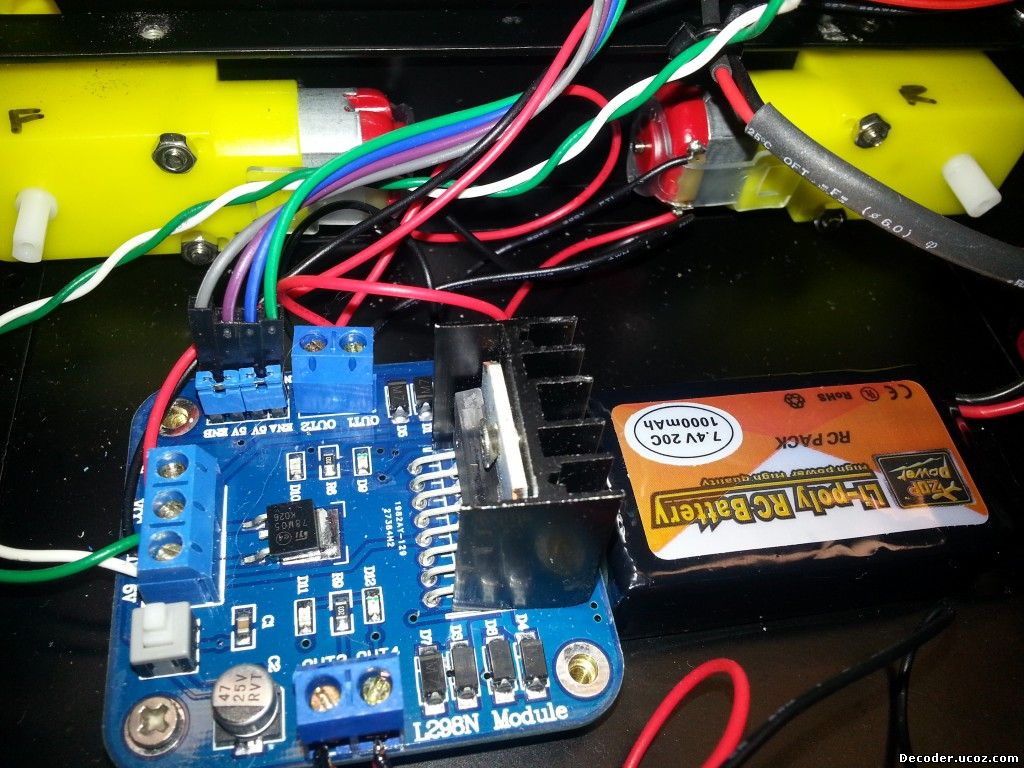
The Kit includes a 4WD robot chassis, Arduino Mega 2560, L298N dual H Bridge driver, sensor shield, wiring and various other items needed.
I decided to document the builds and improvements from start to finish via my YouTube videos so others could benefit. I guess they were pretty good because Sainsmart linked almost all of them to the product listings on their web page
Code // robot.ino
/*
Following code by EricWillaim
All build information, code and forum posts/discussion can be found at:
http://mkme.org
Dedicated build page:
http://www.mkme.org/index.php/arduino-sainsmart-4wd-robot/
This is my attempt at programming the Sainsmart 4WD robot
So far it now checks for a new direction periodically and performs
backup and turn functions as in reaction to the environment it is presented.
It is by far not optimized code- but works for now <img src="http://s41.ucoz.net/sm/24/smile.gif" border="0" align="absmiddle" alt="smile" />
I will update this periodically as I get time to learn new methods and improve the code.
Please check out my Youtube videos here and consider a thumbs up if this helped you!
Youtube : http://www.youtube.com/user/Shadow5549
Some portions of this code adapted from:
http://www.duino-robotics.com/
V9 Dec 12 2013:
Added a forward distance check after turns- will continue to turn if distance still too small
Minor Tweaks but still using delay functions
V10 May 2014
Added support for Roam mode- serial commands will toggle roam versus individual driving commands
*/
#include <Servo.h> //servo library
#include "pitches.h"// used for the speaker output
#define SPEAKER 4// Speaker Pin
Servo headservo;
const int EchoPin = 2; // Ultrasonic signal input
const int TrigPin = 3; // Ultrasonic signal output
const int leftmotorpin1 = 8; //signal output of Dc motor driven plate
const int leftmotorpin2 = 9;
const int rightmotorpin1 = 6;
const int rightmotorpin2 = 7;
const int HeadServopin = 5; // signal input of headservo
const int maxStart = 800; //run dec time- no clue what this is
unsigned long time; //used for upcoming improvements (time used instead of loops)
unsigned long time1; //used for upcoming improvements (time used instead of loops)
int add= 0; //used for nodanger loop count
int add1= 0; //used for nodanger loop count
int roam = 1;
int currDist = 5000; // distance
boolean running = false;// This is from old code examples
void setup() {
//initialize beeps
tone(SPEAKER, NOTE_C7, 100);
delay(500);
tone(SPEAKER, NOTE_C6, 100);
tone(SPEAKER, NOTE_C7, 100);
delay(500);
tone(SPEAKER, NOTE_C6, 100);
tone(SPEAKER, NOTE_C7, 100);
delay(500);
tone(SPEAKER, NOTE_C6, 100);
//End Initialize Beeps
Serial.begin(9600); // Enables Serial monitor for debugging purposes
Serial.println("Serial Data Initiated!"); // Test the Serial communication
pinMode(EchoPin, INPUT);//signal input port
//signal output port
for (int pinindex = 3; pinindex < 10; pinindex++) {
pinMode(pinindex, OUTPUT); // set pins 3 to 10 as outputs
}
// headservo interface
headservo.attach(HeadServopin);
//start buffer movable head
headservo.write(160);
delay(1000);
headservo.write(20);
delay(1000);
headservo.write(90);
delay(1000);
return;
}
void loop()
{
if (Serial.available() > 0)
{
int data = Serial.read(); //read serial input commands
switch(data)
{
case 'w' :
Serial.println("Rolling!");
moveForward();
break;
case 'x' :
backup();
buzz();
break;
case 'a' :
body_lturn();
buzz();
break;
case 'd' :
body_rturn();
buzz();
break;
case 's' :
totalhalt();
break;
case 'r' :
toggleRoam();
buzz();
break;
}
}
if(roam == 0){ //just listen to serial commands and wait
// Do something else if you like
}
else if(roam == 1){ //If roam active- drive autonymously
//time = millis(); // Sets "time" to current system time count
currDist = MeasuringDistance(); //measure front distance
Serial.print("Current Forward Distance: ");
//Serial.println(currDist);
if(currDist > 35) {
add = (add1++);// Start adding up the loop count done in nodanger
nodanger();
Serial.println("Nodanger: ");
}
else if(currDist < 35){
//add=0;
Serial.println("Forward Blocked- Decide Which Way");
backup();
whichway();
}
}
}
//measure distance, unit “cm”
long MeasuringDistance() {
long duration;
//pinMode(TrigPin, OUTPUT);
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH);
delayMicroseconds(5);
digitalWrite(TrigPin, LOW);
//pinMode(EchoPin, INPUT);
duration = pulseIn(EchoPin, HIGH);
return duration / 29 / 2;
}
// forward
void moveForward() {
analogWrite(leftmotorpin1, 0);//Changed these to analog write for slower
analogWrite(leftmotorpin2, 120);
analogWrite(rightmotorpin1, 0);
analogWrite(rightmotorpin2, 120);
}
void toggleRoam(){
if(roam == 0){
roam = 1;
Serial.println("Activated Roam Mode");
}
else{
roam = 0;
totalhalt();
Serial.println("De-activated Roam Mode");
}
}
void nodanger() {
running = true;// Do I need these?
analogWrite(leftmotorpin1, 0);//Changed these to analog write for slower
analogWrite(leftmotorpin2, 120);
analogWrite(rightmotorpin1, 0);
analogWrite(rightmotorpin2, 120);
if (add1 > 38 ) whichway(); // Robot will stop and check direction every X loops through nodanger then resets in totalhalt (40 is good)
return;
}
//backward
void backup() {
add1=0; // resets the counter for the nodanger loops
running = true;//Do I need these?
digitalWrite(leftmotorpin1, HIGH);
digitalWrite(leftmotorpin2, LOW);
digitalWrite(rightmotorpin1, HIGH);
digitalWrite(rightmotorpin2, LOW);
Serial.println("Backing Up");
fart();
}
//choose which way to turn
void whichway() {
running = true;//Do I need these?
totalhalt();
headservo.write(160);
delay(900);
int lDist = MeasuringDistance(); // check left distance
Serial.println("checking left");
Serial.println(lDist);
headservo.write(20); // turn the servo right
delay(900);
int rDist = MeasuringDistance(); // check right distance
Serial.println("checking right");
Serial.println(rDist);
//totalhalt(); // Do I need this??? Used to be used to centre the servo
if(lDist < rDist) {
Serial.println("Decided Right Is Best");
buzz();// Make him talk
body_rturn();
totalhalt();
currDist = MeasuringDistance(); //measure front distance
if(currDist < 45) body_rturn(); //if front distance still too small- turn again
}
else{
Serial.println("Decided Left Is Best");
buzz();// Make him talk
body_lturn();
totalhalt();
currDist = MeasuringDistance(); //measure front distance
if(currDist < 45) body_lturn();// if front distance still too small- turn again
}
return;
}
void totalhalt() {
digitalWrite(leftmotorpin1, HIGH);
digitalWrite(leftmotorpin2, HIGH);
digitalWrite(rightmotorpin1, HIGH);
digitalWrite(rightmotorpin2, HIGH);
Serial.println("Totalhalt!");
headservo.write(90); // set servo to face forward
delay(250);
running = false;//Do I need these?
add1=0; // resets the counter for the nodanger loops
return;
}
//turn left
void body_lturn() {
running = true;
analogWrite(leftmotorpin1, 0);
analogWrite(leftmotorpin2, 220);
analogWrite(rightmotorpin1, 220);
analogWrite(rightmotorpin2, 0);
Serial.println("Turning Left");
delay(400);
}
//turn right
void body_rturn() {
running = true;
analogWrite(leftmotorpin1, 220);
analogWrite(leftmotorpin2, 0);
analogWrite(rightmotorpin1, 0);
analogWrite(rightmotorpin2, 220);
Serial.println("Turning Right");
delay(400);
}
void buzz(){
tone(SPEAKER, NOTE_C7, 100);
delay(50);
tone(SPEAKER, NOTE_C6, 100);
}
void fart(){
tone(SPEAKER, NOTE_C2, 200);
delay(50);
tone(SPEAKER, NOTE_C1, 400);
delay(100);
noTone(SPEAKER);
}

Message edited by sault73 - Tuesday, 26/Aug/2014, 4:39 PM |
| |
|
|